
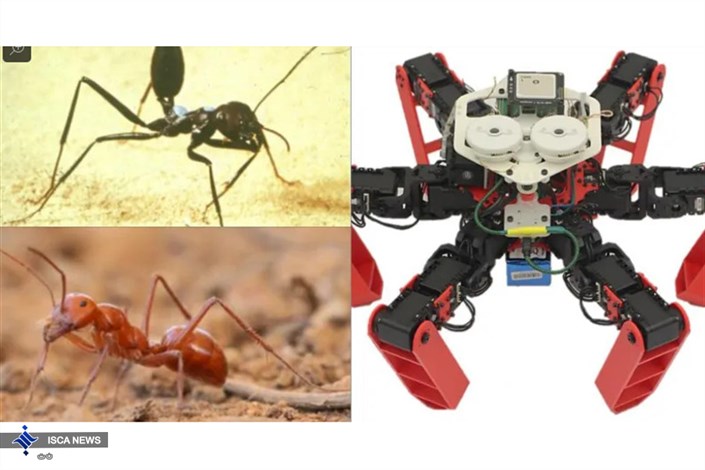
به گزارش گروه علم و فناوری ایسکانیوز، محققان فرانسوی رباتی شش پا به نام «AntBot» را ساختهاند. این ربات 9 اینچی مانند یک مورچه بیابانی شبیه سازی شده و دارای مهارت های ناوبری منحصر به فردی نیز است.
این مطالعه جدید در Science Robotics منتشر شده و نشان می دهد که ممکن است روزی بتوان ربات ها را بدون نیاز به تکنیک های ردیابی رایج نظیر GPS به کار گرفت.
تولید ربات های مبتنی بر حشرات مسئله جدیدی نیستند. روبات های پادار که روی چرخ هایی قرار گرفته اند راحت تر می توانند روی زمین های ناهموار راه بروند. محققان دانشگاه اکسمارسی در جنوب فرانسه از مورچه های بیابانی در طراحی خود الهام گرفتند.
به گفته طراحان این ربات، مورچههای بیابانی مسافتهای طولانی را برای جستجوی غذا می پیمایند، اما به علت گرمای شدید و تبخیر مولکول های فرومون، نمی توانند از بوی خود برای بازگشت به خانه استفاده کنند با اینحال آنها راهی برای جبران این مسئله پیدا کرده اند.
فرمون، یک عامل شیمیایی ترشحشده یا دفع شده است که موجب پاسخ اجتماعی در اعضای یک گونه میگردد. در دنیای جانوران از ارتباط شیمیایی نه فقط برای ارتباط بین یاختهها، بلکه برای ارتباط افراد با یکدیگر نیز استفاده میشود. فرومونها موادی هستند که از یک فرد ترشح شده و در فرد یا افراد دیگری از همان گونه پاسخهای رفتاری ایجاد میکند. فرومونهامواد شیمیایی هستند که قادرند گیرندگان پیام را خارج از بدنِ تولید کننده پیام، تحریک کنند و بر رفتار آنها تأثیر بگذارند. فرومونهای گوناگونی از جمله فرومونهای هشدار دهنده، فرومونهای آمیزش جنسی، و فرومونهای دنبالهدار غذا وجود دارند.
مورچه های بیابانی در روند تکامل خود، حالت های حسی ایجاد کرده اند تا بتوانند با توجه به آن ورودی لانه خود را مشخص کنند. به عبارت دیگر، مورچه ها از انواع ترفندها برای بیاد آوردن محل لانه خود نسبت به محلی که در آن قرار دارند استفاده می کنند که دانشمندان آن را توانایی یکپارچه سازی مسیر می نامند.
به عنوان مثال، چشمان مورچه ها حاوی گیرنده های نور منحصر به فرد هستند که نور ماوراء بنفش را از خورشید جذب می کنند.
این الگو از نور UV، با تغییر خورشید در آسمان عوض می شود. با ردیابی این تغییر الگوها، مورچهها اساسا دارای قطب نمای داخلی هستند که به آنها اجازه می دهد تا مشخص کنند که چه مسیری را در پیش دارند. این تکنیک حتی ممکن است توسط ملوانان در دریا برای حرکت در روزهای ابری استفاده شود.
محققان از این ویژگی برای ایجاد یک پرینتر سه بعدی در این ربات بهره برده اند سپس این ربات را به طور تصادفی در محیط های مختلف بیرون رها کردند. این ربات سریعترین راه را برای بازگشت به خانه با استفاده از ترفند مورچه ها یافت.
شاید از نظر شما جهت یابی امر سادهای به حساب آید اما در عمل، فراهم کردن این قابلیت کار بسیار سختی است و مکانیزم پیچیدهای دارد. در حال حاضر بسیاری از رباتها از فناوری GPS برای مسیریابی استفاده میکنند و این تکنولوژی پیشرفته در بیشتر اوقات جواب میدهد.
با این وجود مسیریابی بر اساس GPS همانند تمامی تکنولوژیهای پیشرفته، مشکلات خود را دارد و نمیتوان از آن در تمامی موقعیتها بهره گرفت؛ برای مثال استفاده از این تکنولوژی در مقیاس کوچک و برخی موقعیتهای ویژه آنچنان کارایی بدون نقصی ندارد. در مناطق جنگلی و پر از درخت نمیتوان روی سیستم مسیر یابی GPS حساب کرد چرا که درختها مانع رسیدن سینگالها به ربات میشوند.
انتهای پیام/